不捏烂不撕碎,机器人也会剥香蕉皮
机器人三分钟完美剥完香蕉皮
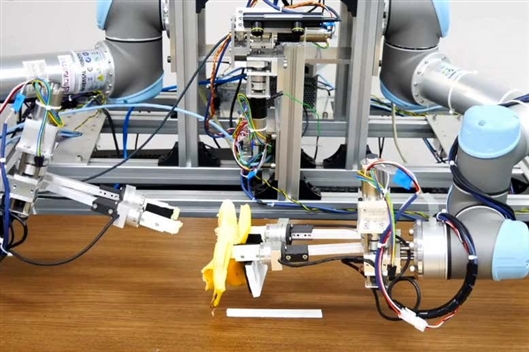 剥香蕉的机器人 图片来源:Heecheol Kim
剥香蕉的机器人 图片来源:Heecheol Kim
根据近日发表于预印本平台arXiv的一篇论文,一个经过机器学习训练的机器人可以模仿人类成功地剥香蕉,而不会把它撕成碎片。
处理柔软的水果对机器人来说是一个挑战,因为机器人通常缺乏在不破坏物品的情况下处理它们的灵巧性和细微的触感。水果形状参差不齐,即使是同一种水果,形状也会有很大差异——这会扰乱计算机视觉算法,而视觉算法通常充当机器人的大脑。
日本东京大学的Heecheol Kim和同事开发了一种为机器人提供动力的机器学习系统,它有两个手臂和两只手,用两个“手指”抓东西。
首先,一个人操作机器人为数百根香蕉剥皮,通过811分钟的演示数据训练机器人自己完成这件事。这项任务被分为9个阶段,从抓住香蕉到用一只手把它从桌子上拿起来,用另一只手抓住香蕉的一头,剥开香蕉皮,然后移动香蕉,以便剥掉剩下的皮。
对于不太可能损坏香蕉的大范围运动,机器学习模型绘制出一条轨迹,模仿人类不需要太多思考的动作。但当需要手臂精确操纵香蕉时,系统会切换到反应式方法,对环境中的意外变化做出响应。
在测试中,该机器人剥香蕉皮的成功率为57%。整个过程不到3分钟。
英国谢菲尔德大学的Jonathan Aitken说:“在这个案例中,真正有趣的是,人类使用灵巧的手的过程已经通过深度模仿学习应用于机器人系统的训练中。”
Kim表示,团队的方法具有数据高效性,因为它使用了13小时的训练数据,而不是数百或数千小时的。“它仍然需要大量昂贵的GPU(图形处理单元),但我们可以减少大量的计算量。”
Aitken想看看机器人是如何处理更“畸形”的水果的。但他说,如果有更好的运动控制,它可能会工作得更好。然而,这项技术不会简单地用于香蕉,其目标是训练一个系统,使其能够更普遍地处理需要精细运动技能的任务。
相关论文信息:https://doi.org/10.48550/arXiv.2203.09749
源:中国科学报
“传感器细菌”可获取肠道健康信息
来源:科技日报科技日报柏林5月15日电(记者李山)近日,瑞士科学家利用基因改造过的细菌做数据记录器,在不干扰正常生理的情况下获取了不同饮食和疾病背景下小鼠肠道内微生物群的基因活动信息。该研究将推动非侵入式肠道疾病诊断的发展,并且表明转录记录具有生物医学研究和未来生物医学诊断应用的潜力。相关成果发表在《科学》杂志上。0000国际最新研究:“大约翰”三角龙头骨创伤或与同类恐龙战斗造成
施普林格·自然旗下开放获取学术期刊《科学报告》最新发表一篇古生物学论文,研究人员对被称为“大约翰”的化石化三角龙恐龙遗骸标本进行分析,认为其头骨创伤可能是与其他三角龙战斗造成的。褶皱三角龙是一类有角的恐龙物种,特征是拥有很大的颈盾,颈盾由顶骨和鳞状骨延伸形成。人们认为这些骨质颈盾的用途是在与其他三角龙的打斗中提供保护。诺哈网2023-05-25 20:15:360000我国“焊接泰斗”、中科院院士潘际銮逝世
中国科学院院士、国际著名焊接工程教育家和焊接工程专家、清华大学机械工程系教授潘际銮同志,因病医治无效,于2022年4月19日,在北京逝世,享年95岁。潘际銮同志长期从事焊接科学技术研究,取得了多项重要创新性成果,在不同历史时期,为国家的科技进步创造了多项“第一”,推动了先进焊接技术装备在国家重大工程中的应用,引领和带动了国际焊接工程科学发展。源:人民网诺哈网2023-05-25 21:57:260000柳叶刀:新冠变异株可能正在免疫低下感染者体内
近日,国际权威医学期刊《柳叶刀》发表了一篇题为《下一个新冠病毒“关切变异株(VOC)”在哪》(WhereisthenextSARS-CoV-2variantofconcern?)的评论。评论表示,某个免疫力低下的新冠感染者体内可能正在进化着一个新冠病毒变体:它具有高度传染性、能挑战现有免疫和疗法。0000四文齐发!迄今最全人类细胞图谱登上《科学》封面,书写人体百科全书
今日,顶尖学术期刊《科学》四篇重磅论文同时上线,报告了构建综合性人类细胞图谱(HumanCellAtlas)取得的里程碑结果。多国科学家通力合作,创建出了迄今为止最为全面的泛组织人体单细胞图谱:涉及33种人体组织、超过100万个细胞,涵盖500多种细胞类型。▲这一成果登上了最新一期《科学》杂志的封面诺哈网2023-05-25 22:01:130000




